Недавно группе специалистов из университета Северной Каролины удалось создать новую технологию управления движениями миниатюрных мягких роботов. Отличительной особенностью новой разработки является использование в качестве элемента управления магнитного поля, которое избирательно воздействует на намагниченные микрочастицы, включенные в состав тела роботизированных механизмов.
При использовании нового подхода ученые даже собрали ряд демонстрационных образцов, имеющих различную форму. При изготовлении робота был использован жидкий полимер, в который ввели намагниченные микрочастицы. Эти частицы введены в виде параллельных цепочек при помощи воздействия внешнего магнитного поля. Таким образом, после полимеризации материал превратился в мягкую и упругую пленку, внутри которой и находятся магнитные цепочки.
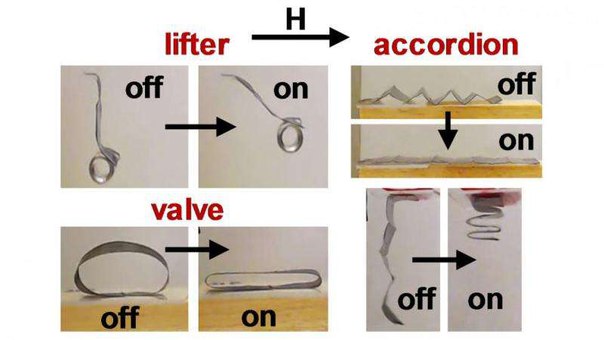
Магнитные частицы в составе материала реагируют на внешнее магнитное и обладают достаточно большой силой. К примеру, один из опытных образцов мягких роботов способен поднимать вес в 50 раз превышающий его собственный. Второй способен ритмично сокращаться и удлиняться, имитируя работу мышц. Еще один образец может может работать в качестве насоса. Как утверждает один из авторов исследования профессор Джо Трейси,
«Наличие этих цепочек позволяет нам при помощи внешнего магнитного поля контролировать движения и действия этих мягких микророботов. Меняя направленность и интенсивность этого поля, мы можем заставить микророботов выполнять работу по целевой доставке лекарственных препаратов, по разрушению сгустков, закупоривших кровеносные сосуды, и по перекачке жидкостей внутри тела человека. Кроме этого, такие роботы могут заниматься созданием, развертыванием более сложных складных структур элементами которых являются они сами. Сейчас мы планируем увеличить силу робота и улучшить контроль за движением. Это позволит нам существенно расширить потенциал мягкой робототехники, области, которая развивается бурными темпами в последнее время.»
-